


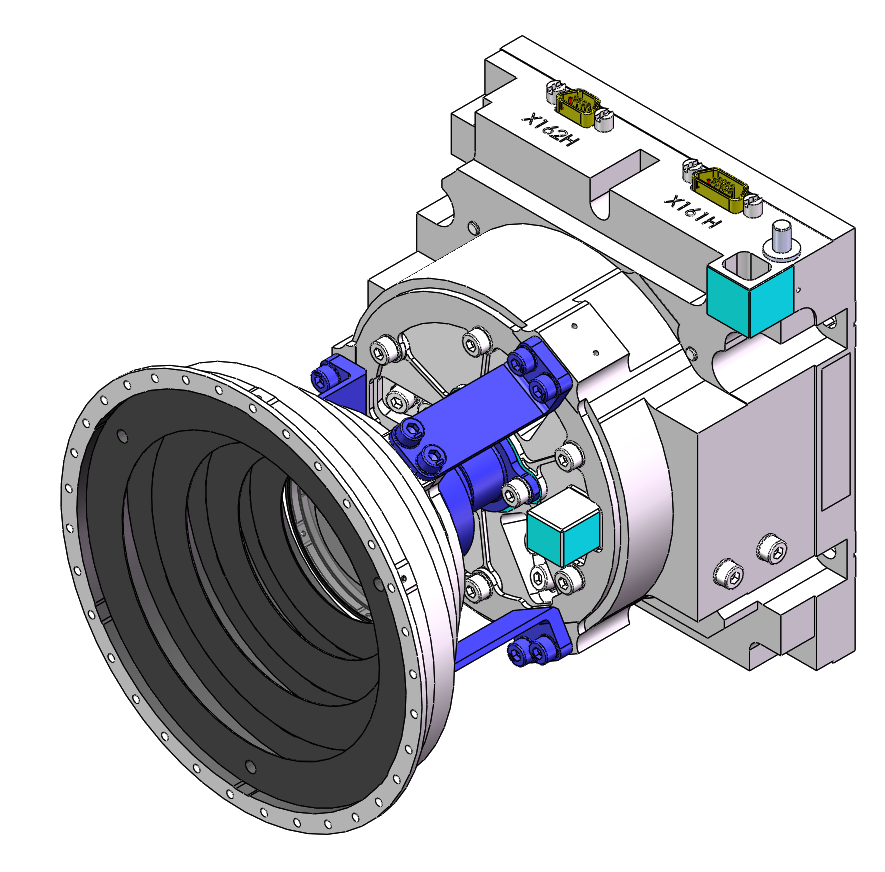
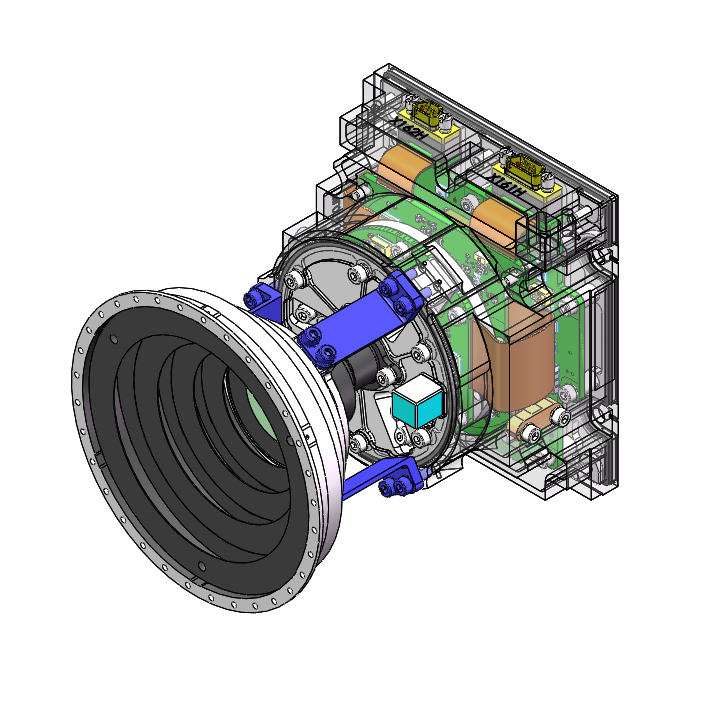
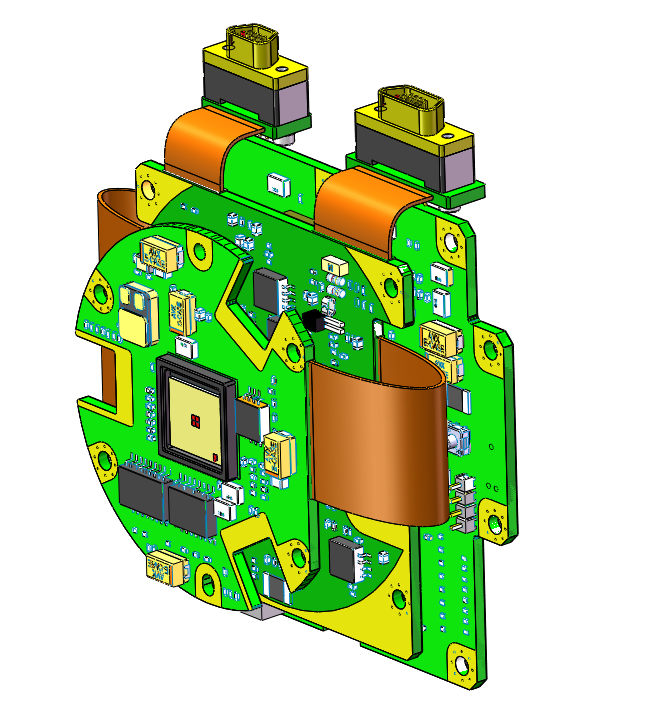
The Camera Optical Unit (COU) is a stand-alone small digital camera with addressable CMV4000 detector, providing snapshot B&W images in 1k x1k image format at 10fps. The camera objective design is refractive and contains 8 lenses, the FOV is 70° x 70° round. The spectral range goes from 425 nm to 775 nm. This camera has a mass of around 0,6 kg and a low power consumption (<6W). The dimensions are about 11 × 10 × 14 cm³.
Name: Camera Optical Unit
Mission: PILOT
Application: Providing a visual navigation and hazard avoidance system
Life:
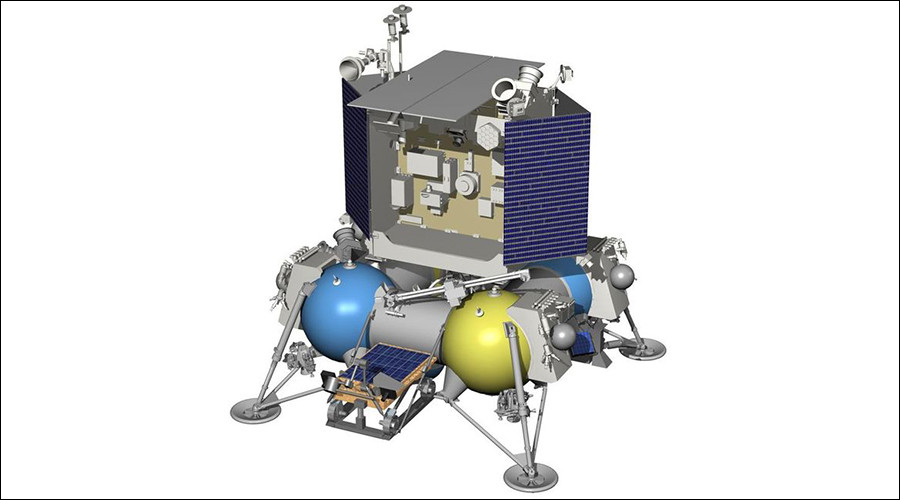
The Camera Optical Unit (COU) has been developed in the frame of the PILOT project, which aims at providing a visual navigation and hazard avoidance system to safely land on the moon surface, originally intended as a European contribution to the Russian Luna Resource (Luna 27) mission.
A demonstrator model of the COU will be flown as LandCam-X on the
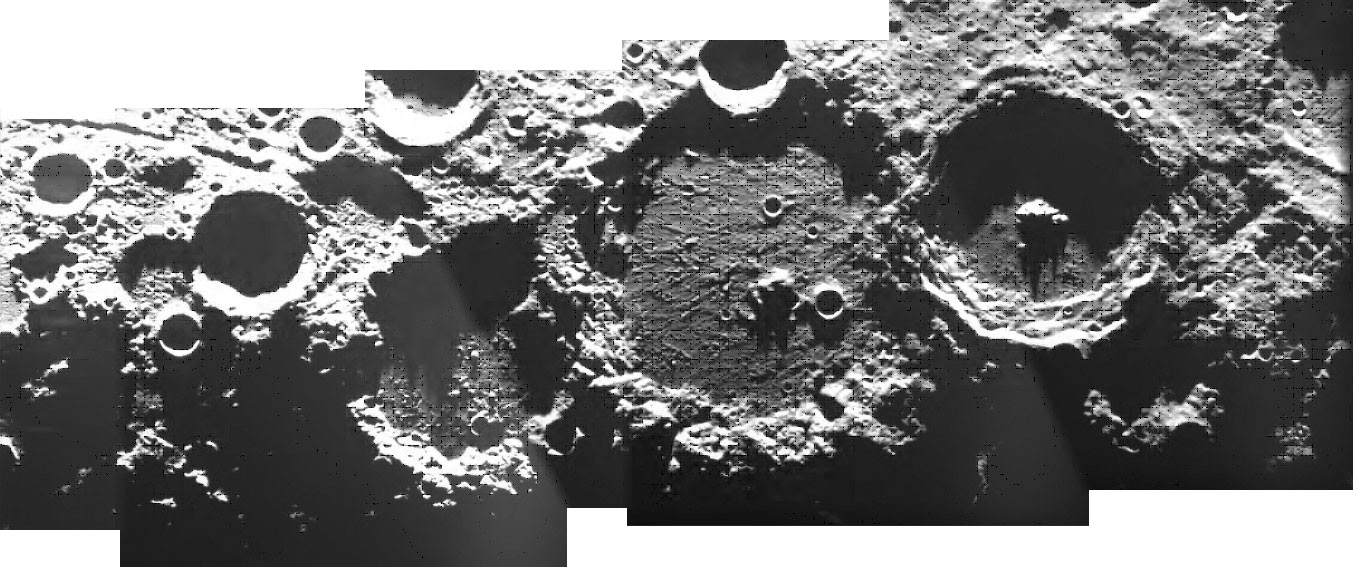
Griffin lunar lander of Astrobotic. This camera will allow to get real, in situ image data. The aim is to deliver B/W images of the lunar surface during orbiting and landing.
OIP, as a subcontractor for Airbus Defense Space [D], is responsible for the full development of the PILOT COU.

PILOT (Precise and Intelligent Landing using Onboard Technologies) is a suite of advanced landing technologies, enabling global access to the lunar surface, precisely and safely. It performs the functions of Visual Navigation and Hazard Detection & Avoidance in an autonomous manner onboard the spacecraft. The PILOT Subsystem consists of several sensors, i.e. landing cameras, a 3D-imaging LIDAR and a Landing Processing Unit (LPU).
A first flight opportunity has been identified in the frame of the ESA-ROSCOSMOS cooperation on Lunar exploration. The PILOT subsystem will be integrated as part of the Guidance Navigation and Control of the Russian Luna-Resource-1 lander, enhancing its landing performance. It will allow to reach landing areas in the South Polar region of the Moon, with an increased probability of success, and to gain the experience and capability required to feed forward to future exploration missions.
In addition, the possibility to embark a landing Camera Optical Unit (COU) as a “passenger” onboard the earlier Russian-led Luna-Glob Lander mission has been identified in cooperation with ROSCOSMOS. This opportunity will allow to demonstrate in-flight the operational capability of the PILOT Camera and to record real images during the Luna-Glob landing. These images, once downlinked, will be used on-ground as inputs for further validation and verification of the overall PILOT subsystem for the Luna-Resource-1 Lander mission. An additional unit specific to this mission (Camera Demonstrator Interface Unit – CDIU) will provide the interfaces between the Camera Optical Unit and the Luna-Glob Lander platform.
The aim is to have B/W images of the lunar surface during orbiting and landing. These images will be used for real-time feature tracking (visual navigation) and landing site selection (hazard avoidance) by Airbus DS (Germany).
PILOT is operated in the Low Lunar Orbit (LLO), Elliptical Orbit (EO), Main Braking, Precision Braking and Surface phases of the Luna Resource (LR) mission.
PILOT will be launched from Vostochnyi launch site; Uglegorsk; Amur region; Russia on a Soyuz-2-1b/Fregat.
OIP is responsible for the full development of the PILOT Camera Optical Unit (COU) for the Luna Glob mission, during the Phase B+.
Following models are foreseen:
OIP participated in the Phase B+ of the PILOT project as a subcontractor to Airbus Defense & Space (PILOT-D contract).
OIP is nominated as mandatory supplier for the Phase C/D as the COU design is qualified within the PILOT-D contract
The project is reaching its final stages with QM and FM models delivered to Airbus. The PILOT-D system (COU + harness + CDIU) is in the acceptance phase with the Russians for delivery in December 2020.

This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.

